发布日期:2026-05-12 浏览:5
美国哈佛大学约翰·A·保尔森工程与应用科学学院的研究人员近日成功3D打印出一种新型纤维,能够在温度变化时实现弯曲、扭转、膨胀或收缩。该行为模仿了象鼻、章鱼触手和植物卷须等生物结构,研究基于Jennifer A. Lewis教授此前提出的旋转多材料3D打印(RM-3DP)概念。成果发表于《美国国家科学院院刊》(PNAS),由Lewis教授(Hansjorg Wyss生物启发工程教授)与L. Mahadevan和Joanna Aizenberg教授共同领导。
原理:双材料共挤+旋转打印编码分子取向
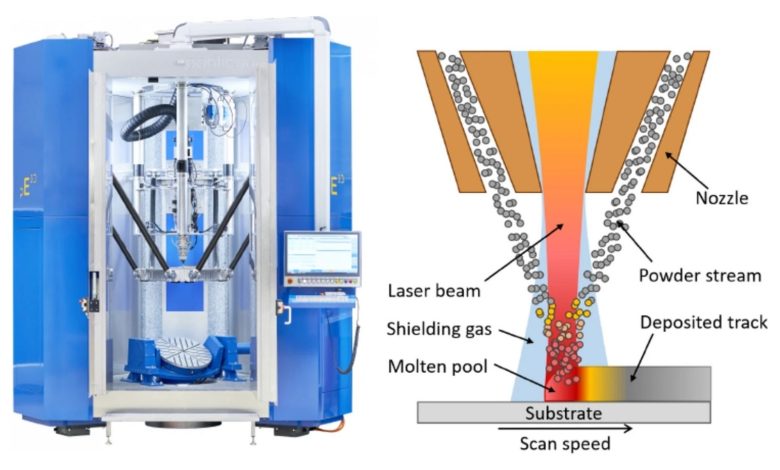
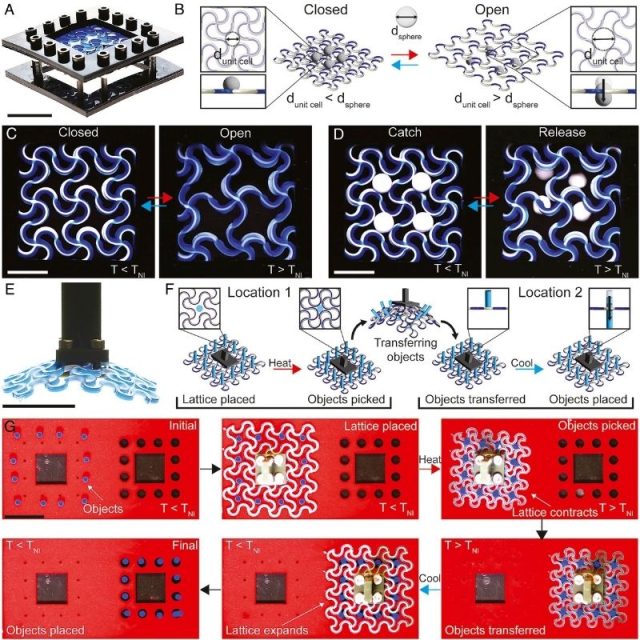
RM-3DP技术使用定制的双通道喷嘴共挤出两种弹性体:一种是有热响应性的液晶弹性体(LCE),在加热至高于其各向同性转变温度时,会沿着分子排列方向收缩;另一种是被动丙烯酸酯弹性体,其形状不随温度变化。打印时旋转喷嘴,可在LCE内部刻入螺旋式分子排列,从而在制造过程中直接“编程”纤维的弯曲和扭转响应。两种材料的弹性模量相差50倍,为调控形状变化提供了额外的设计变量。在25°C至175°C的重复热循环测试中,纤维在100次循环后未出现可观察到的降解或界面分层。
从纤维到功能结构
团队将纤维组装成可膨胀和收缩的晶格结构,并在单一结构中同时使用两种类型的纤维,使平坦的晶格变形为穹顶或马鞍形,结果与计算模型高度吻合。在功能演示中,研究人员制造了一种按需开闭孔径的主动过滤器,以及一种能够同时抓取和转移多个物体的“拾取-放置”抓手——这与大多数每次只能处理一个物体的软体抓手不同。关于可扩展性,论文合著者、研究生Jackson Wilt表示:“未来可以制造更复杂的喷嘴,与其他材料集成——例如,加入液态金属通道实现驱动,或集成其他功能。”Lewis教授强调了该工作的工业相关性:“这种纤维设计和打印框架可以加速人工肌肉类材料从实验室向现实技术应用的过渡。”该研究为软体机器人、智能纺织品和可变形结构等领域提供了新的制造思路。



 粤公网安备44190002007368号
粤公网安备44190002007368号